
0. 导语
最近一段时间都在恶补数据结构和C++,加上导师的事情比较多,Linux内核驱动的学习进程总是被阻碍、不过,十一假期终于没有人打扰,有这个奢侈的大块时间,可以一个人安安静静的在教研室看看Linux内核驱动的东西。按照Linux嵌入式学习的进程,SPI驱动搞完了之后就进入到I2C驱动的学习当中,十一还算是比较顺利,I2C的Linux驱动完成了。
为了测试I2C是否好用,选择一个常用的I2C传感器,手头有个MPU6050,刚好作为I2C的从器件,那就以MPU6050为例,进行Linux底层的I2C驱动开发。
同样的使用Linux内核中的GPIO模拟I2C的时序一点难度没有,I2C的硬件标准时序也是非常的简单,闭着眼睛都能画出时序图吧,如果我们使用Linux内核提供了I2C机制,那么问题不单单是要解决时序,而重点在于对于整个I2C的机制的把握,,。刚刚拿到I2C内核机制的时候,我也看的很晕,i2c_client, i2c_master, i2c_driver, i2c_device,这些东西到底有什么关系呢?到底我该如何让Linux系统的I2C为我所用,按照我的意愿对MPU6050进行读取?到底我能挑出对我有用的Linux的I2C机制,其他没用的机制我不启动,以简化代码。
那么,就真需要从I2C最底层说起。
1. 实验平台
| 平台 | 内容 |
|---|---|
| ARM板子 | 友善之臂Nano-T3 (CortexA53架构,Samsung S5C6818芯片) |
| ARM板子的Linux系统 | Ubuntu 16.04.2 LTS |
| Linux开发主机 | Ubuntu 16.04.3 LTS amd4版本 |
| Linux内核版本 | Linux3.4.y |
| 编译器COMPILE_CROSS | arm-cortexa9-linux-gnueabihf- |
| 从设备 | MPU6050模块(I2C接口) |
2. 查看系统I2C的支持
按照SPI驱动的思维,使用spi_driver注册,然后和spi_device匹配,使之进入probe函数,完成spi_master的获取,依照这个方法,我的I2C驱动也是按照这个方法,寻求i2c_driver和i2c_device匹配,然而I2C的驱动尤其特殊之处,使得我的i2c_driver怎么注册都不成功,不是内核内存炸了,就是总是返回失败。
后来我才发现,i2c的使用是不需要注册的,或者严格说一点,Linux系统在启动的时候已经帮你注册好了,而你再去i2c_driver_register的时候肯定是失败的。所以到底我们使用I2C驱动的时候到底需不需要注册,则需要在Linux系统里面查看当前I2C的注册状态。那么流程就比较清晰了,如果查看系统注册了I2C那么就在驱动中直接使用;如果系统没有注册I2C那么我们先注册I2C再使用。
2.1 如何查看?
目标板终端输入:ls /sys/bus/i2c/devices

可以看到我这个主机是支持4个I2C外设的(方框圈出),如果是这样的情况,我们就可以直接使用上面的i2c。这里的i2c-0,i2c-1....指的是4个i2c_master,而i2c_master可以挂N个i2c_client。
其他的数字设备就是我挂载的i2c_master上的i2c_client,举个例子,画圈的【0-0069】意思是:挂载到i2c-0上的从地址为0x69的设备,那么【2-0048】的意思就是:挂载到i2c-2 adapter上的从地址为0x48的设备。
我们开发的MPU6050驱动依托I2C进行传输,则需要在这个文件夹创建设备节点才能利用Linux内核提供的I2C方法进行数据的交互。
2.2 弄清楚MPU6050的从地址与Linux I2C从地址的合法性
随手搜了一下MPU6050的从地址,有的给出了MPU6050的从地址是0x68,有的给出的是0xD0,一开始我也懒查,认定MPU6050的地址在A0引脚为低电平的时候为0x68,加载驱动的时候出现了很尴尬的事情,0-0068这个地址已经被DS1607实时时钟占用,然后网上有人说是把A0引脚打到高电平地址就是0xD0,可是我试0xD0的时候,被Linux警告,说是从地址不合法,我查看了Linux内核的i2c_core.c文件,里面有个地址校验,高于0x7F的7-bit地址,都是不合法的,Linux不可能犯这样的错误,肯定是网友的锅。果然,我阅读了手册,如果A0的电平为高那么地址是0x69。说从地址是0xD0的人,犯了一个错误,他们多半玩的是模拟IO出的I2C波形,他们对I2C协议标准不够了解,的确0x69 << 1 = 0xD0,I2C在读写的时候,预留出7-bit地址前移1位,把最低位作为读写标识,但绝对不能说从地址就是0xD0。
不过可以再一次看见Linux内核的严谨、严肃的态度。也再一次说,不能懒惰,自己查手册,看最标准的说明。
3 I2C 驱动开发
我这里给出最简单的模型,其他的字符驱动注册什么的同spi驱动,这里只说明I2C驱动怎么使用。
3.1 I2C的注册
static struct i2c_board_info __initdata sp6818_mpu6050_board_info = {
I2C_BOARD_INFO("mpu6050-i2c", MPU6050_SLAVE_ADDRESS),,
.irq = -1,
};
int xxx_hw_init(){
struct i2c_client *client;
struct i2c_adapter *adapter;
adapter = i2c_get_adapter(0);
if (!adapter) {
ret = -ENXIO;
printk(DRV_NAME "\terror: %d : init i2c adapter failed.\n", ret);
return ret;
}
strlcpy(adapter->name, "nxp_i2c",sizeof(adapter->name));
client = i2c_new_device(adapter, &sp6818_mpu6050_board_info);
if (!client) {
ret = -ENXIO;
printk(DRV_NAME "\terror: %d : init i2c client failed.\n", ret);
return ret;
}
}你没有看错,i2c的使用就是这么简单,我有什么办法,我之前开发加上i2c_register和字符驱动的初始化什么的,整init函数整了近100多行,结果不断的尝试,发现就这些。
下面就说几个重点:
3.1.1 adapter的获取
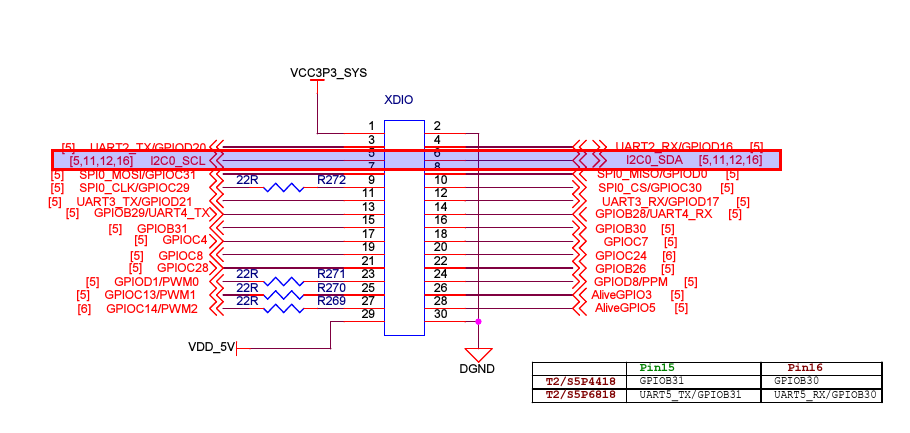
adapter = i2c_get_adapter(0);定义一个指针,然后使用i2c_get_adapter(0),得到我们上面说的,i2c-0,这个adapter。你疑问了,我为什么选择i2c-0这个adapter,为什么不选择-i2c-其他。因为这个开发板只把-i2c-0的引脚印出来了。
。。。
这样就获取到了adapter。
3.1.2 client的创建
接着我们就要创建一个client,这个client就指的是你的mpu6050,我们使用i2c_board_info这个结构体来描述mpu6050,先定义一个这个info:
static struct i2c_board_info __initdata sp6818_mpu6050_board_info = {
I2C_BOARD_INFO("mpu6050-i2c", MPU6050_SLAVE_ADDRESS),,
.irq = -1,
};第二行的,”mpu6050-i2c“就是注册到Linux系统里面的设备名字,可以在如图所示路径和cat命令查看。

MPU6050_SLAVE_ADDRESS就是MPU6050的地址了,0x69 ,MPU6050的A0接高电平,地址是0x69没毛病。
然后,就是生成这个client且和之前那个adapter绑定:
client = i2c_new_device(adapter, &sp6818_mpu6050_board_info);
之后client的信息和adapter的信息我们要保存起来,可以定义一个全局指针之类的承接初始化后的client和adapter,因为后面的传输数据要用。
到此,I2C完成了,很简单,可是探索起来好麻烦。
3.2 I2C数据的写入
static int
__mpu6050_write_reg(MPU6050* this, char reg_addr, char reg_value)
{
int ret;
struct i2c_msg msg;
char write_buffer[10];
memset(write_buffer, 0, 10);
write_buffer[0] = (char)reg_addr;
write_buffer[1] = (char)reg_value;
msg.addr = (this->hw->i2c_clit->addr);
msg.flags = 0;
msg.len = 2;
msg.buf = &write_buffer[0];
ret = i2c_transfer(this->hw->i2c_adper, &msg, 1);
return ret;
}看一下我的数据写入函数,提取出有用的信息,mpu6050写寄存器,需要传输两个字节的信息,一个是寄存器地址,另一个是寄存器的值,按照上面的格式进行,msg.length不包含器件的从地址,就是实在的你想法几个数据的多少,我们这里只发两个,一个是寄存器地址和寄存器的值,所以是2;如果你是要发送则msg.flag一定是0。
我的函数this->hw->i2c_adapter就是上面存储的adapter的指针,this->hw->i2c_clit就是存储的上面初始化的client的指针。
3.3 I2C数据的读
读相比于写就费劲多了,但是也没难到哪里去,只不过是两条msg,先写后读:
__mpu6050_read_reg(MPU6050* this, char reg_addr)
{
struct i2c_msg msg[2];
char write_buffer[10];
int ret, i;
memset(write_buffer, 0, 10);
memset(this->buffer, 0, 10);
write_buffer[0] = (char)reg_addr;
msg[0].addr = (this->hw->i2c_clit->addr);
msg[0].flags = 0;
msg[0].len = 1;
msg[0].buf = &write_buffer[0];
msg[1].addr = (this->hw->i2c_clit->addr);
msg[1].flags = I2C_M_RD;
msg[1].len = 1;
msg[1].buf = &this->buffer[0];
ret = i2c_transfer(this->hw->i2c_adper, &msg, 2);
}意思很明显。
到此,i2c的注册和数据传输完成,我们可以在上层建立函数读取MPU6050的值了。
4 成果
验证函数:
#include <unistd.h>
#include <stdlib.h>
#include <sys/stat.h>
#include <fcntl.h>
short x_accel, y_accel, z_accel;
short x_gyro, y_gyro, z_gyro;
int main()
{
char buffer[128];
short *time;
int in, out;
int nread;
in = open("/dev/MPU6050", O_RDONLY);
if (!in) {
printf("ERROR: %d, Open /dev/MPU6050 nod failed.\n", -1);
return -1;
}
nread = read(in, buffer, 12);
close(in);
if (nread < 0) {
printf("ERROR: %d, A read error has occurred\n", nread);
return -1;
}
time = (short*)buffer;
x_accel = *(time);
y_accel = *(time + 1);
z_accel = *(time + 2);
x_gyro = *(time + 3);
y_gyro = *(time + 4);
z_gyro = *(time + 5);
printf("x accel is: %d \n", x_accel);
printf("y accel is: %d \n", y_accel);
printf("z accel is: %d \n", z_accel);
printf("x gyro is: %d \n", x_gyro);
printf("y gyro is: %d \n", y_gyro);
printf("z gyro is: %d \n", z_gyro);
exit(0);
}测试脚本:
# !/bin/bash
for((i=1;i<=10000;i++));
do
./test_mpu6050.o
sleep 1
done 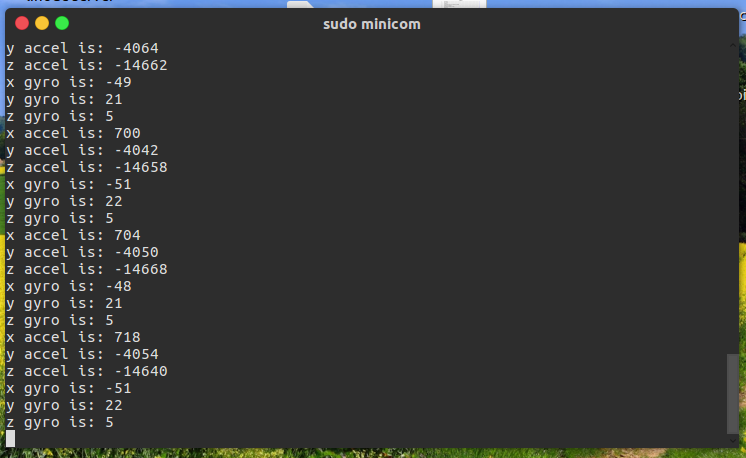
源代码:
Github地址:https://github.com/lifimlt/ca...
见 mpu6050.c mpu6050.h 和mpu6050_def.h三个文件
mpu6050_test.c为测试文件
参考文献:
[1] Linux org, Serial Peripheral Interface (I2C),
[2] choiyoung87, Linux中的I2C(二)——adapter的初始化, 2011年12月01日
[3] liuwanpeng , [《linux设备驱动开发详解》笔记——15 linux i2c驱动](http://www.cnblogs.com/liuwan... 2017年8月23日



**粗体** _斜体_ [链接](http://example.com) `代码` - 列表 > 引用。你还可以使用@来通知其他用户。