
从零开始构建bootloader
项目步骤:第一阶段:
1、关看门狗;
2、时钟初始化;
3、内存初始化;
4、NandFlash初始化;
5、代码重定位(将flash中的代码复制到指定的内存地址处,也即代码段链接地址);
6、跳转到main函数;
第二阶段:
7、写main函数,在函数中设置要传给内核的参数;
8、跳转到内核入口,启动内核
9、制作链接脚本
第三阶段:
10、编写Makefile文件;
11、编译、下载、运行
1、编写start.S文件,初始化片上硬件
本文件需要完成的目标:
1.关看门狗
2.设置时钟
3.开启指令缓存,初始化SDRAM
4.重定位(把bootloader本身的代码从flash复制到它的链接地址(c函数编写),然后清空bss段(c函数编写))
5.跳转到main函数。
#define CLKDIVN 0X4C000014 /设置FCLK:HCLK:PCLK的比例/
#define MPLLCON 0x4C000004 /设置FCLK频率/
#define S3C2440_MPLL_200MHZ ((0x5c<<12)|(0x01<<4)|(0x02))
#define S3C2440_MPLL_400MHZ ((0x5c<<12)|(0x01<<4)|(0x01))
#define WTCON 0x53000000 /看门狗寄存器/
#define BWSCON 0X48000000 /BANK寄存器/
.text /设置代码段/
.global _start /定义全局变量,要被链接脚本用到/
_start: /_start跳转到这里实现硬件初始化/
/ 1.关看门狗/
ldr r0, =WTCON
mov r1, #0
str r1, [r0]
/ 2.设置时钟(必须设为异步总线模式) /
ldr r0, =CLKDIVN
mov r1, #5 / FCLK:HCLK:PCLK=1:4:8 /
str r1, [r0]
mrc p15, 0, r1, c1, c0, 0 /设置为asynchronous bus mode/
orr r1, r1, #0xc0000000
mcr p15, 0, r1, c1, c0, 0
ldr r0, =MPLLCON / 设置时钟频率FCLK为400MHZ /
ldr r1, =S3C2440_MPLL_400MHZ
str r1, [r0]
/ 3.使能ICache,加快指令访问速度;因为目前没有开启MMU,所以还不能开启数据缓存DCache /
mrc p15, 0, r0, c1, c0, 0 / read control reg /
orr r0, r0, #(1<<12)
mcr p15, 0, r0, c1, c0, 0 / write it back /
/ 4.初始化SDRAM /
ldr r0, =BWSCON
adr r1, sdram_config / 使用adr跳转,因为SDRAM未初始化 /
add r3, r0, #(13*4)
1:
ldr r2, [r1], #4
str r2, [r0], #4
cmp r0, r3
bne 1b /back to 1 when no equal/
/ 4.重定位 /
ldr sp, =0x34000000 /因为SDRAM大小为64MB,所以堆栈指针设在最高地址处/
bl nand_init
mov r0, #0 / src = r0 /
ldr r1, =_start / dest = r1,_start为代码段的起始和链接地址0x30000000 /
ldr r2, =__bss_start
sub r2, r2, r1 / len = r2,代码段长度/
bl copy_code_to_sdram / 调用C函数copy_code_to_sdram(src, dest, len)/
bl clear_bss / 清除bss段/
/ 5.执行main /
ldr lr, =halt
ldr pc, =main
mov pc,lr / 若main函数跳出后,使PC等于lr链接寄存器,避免程序跑飞 /
halt:
b halt / 死循环,避免跑飞 /
sdram_config:
.long 0x22011110 //BWSCON
.long 0x00000700 //BANKCON0
.long 0x00000700 //BANKCON1
.long 0x00000700 //BANKCON2
.long 0x00000700 //BANKCON3
.long 0x00000700 //BANKCON4
.long 0x00000700 //BANKCON5
.long 0x00018005 //BANKCON6
.long 0x00018005 //BANKCON7
.long 0x008C04F4 // REFRESH
.long 0x000000B1 //BANKSIZE
.long 0x00000030 //MRSRB6
.long 0x00000030 //MRSRB7
关于时钟频率的设置解释:
- 将CPU频率设为最大值400MHZ(内核启动时间7S变为6S,因为HCLK和PCLK频率没有改变) 然后分频系数FCLK:HCLK:PCLK需要设置为1:4:8。
- 因为HCLK最高133MHZ,这里需要设置为100MHZ,PCLK最高50MHZ,所以这里需要设置为50HZ,所以得出 CLKDIVN寄存器需要等于0X5即可。
- 具体为什么等于0x5,可以参考下图:
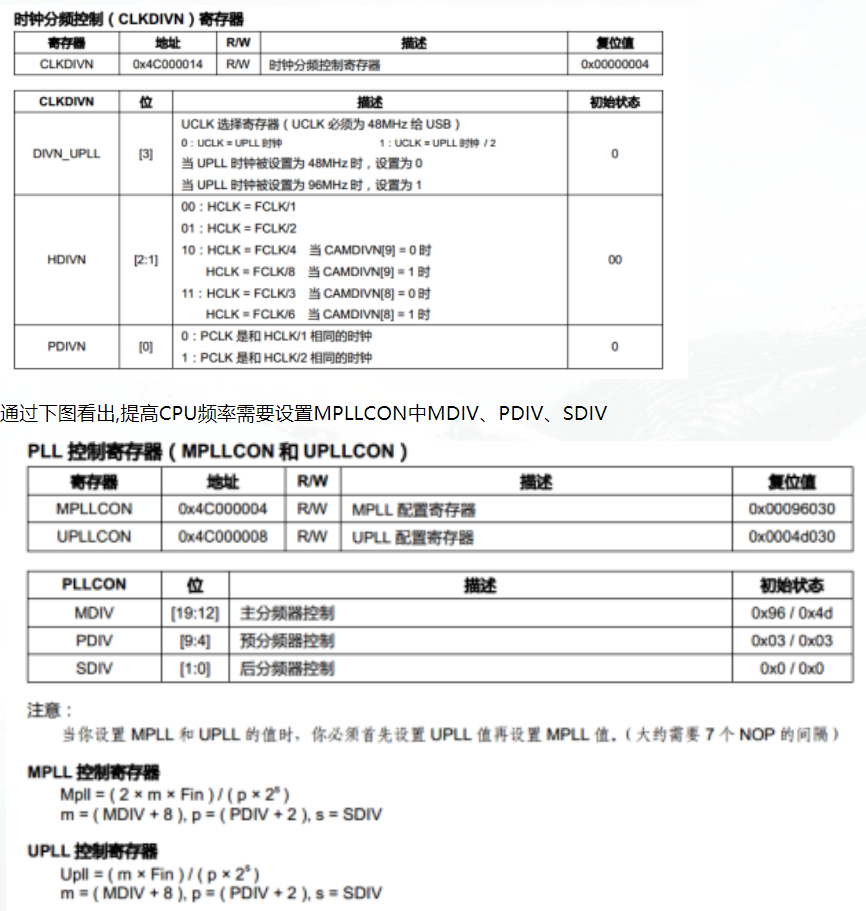
通过查看数据手册,得知当FCLK取400MHZ时,设置MDIV为0X5C,PDIV为0x1,SDIV为0x1。
关于Cache的设置解释:
- 通过高速缓存存储器可以加快对内存的数据访问,在CAHE中有ICAHE(指令缓存)和DCAHE(数据缓存): ICAHE: 指令缓存,用来存放执行这些数据的指令; DCAHE: 用来存放数据,需要开启MMU才能开启DCAHE。 在没开启ICAHE之前,CPU读取SDRAM地址数据时,每次都需要先访问一次地址值,在读数据. 当开了ICAHE后,第一次读取SDRAM地址数据时,ICAHE发现缓存里没有这个地址数据,然后将SDRAM中需要读取的那部分一大块内存数据都复制在缓存中,后面陆续读取数据就不会再访问SDRAM了,直到CPU没有找到地址数据后ICAHE再从SDRAM中重新复制
- 通过CP15协处理器来开启ICAHE:ICAHE控制位在CP15的寄存器C1中位12(如下图), 然后通过MRS和MSR向该位12置1,开启ICAHE.所以代码如下(放在SDRAM初始化之前):
- mrc p15, 0, r0, c1, c0, 0 //将 CP15 的寄存器 C1 的值读到 r0 中
orr r0, r0, #(1<<12) //将r0中位12置1
mcr p15,0, r0,c1,c0,0 //开启ICAHE
2、编写init.c,用于重定位,bss段清除,初始化NandFlash
(1)编写nand_init()函数
准备知识:
我使用的NandFlash型号为K9F2G08U0M,通过查阅芯片手册获知该flash大小=2048块Block=128KPages=256MB=2Gb 。且其构成为:
1个设备=2048(Block)
1块Block=64(Pages)
1页=(2K+64)(Byte) 因为每个地址里都存放了一个字节,所以用Byte表示,其中64B是存放ECC的OOB地址,(ECC:存放判断位反转的校验码)

写过程:
- 写页
- 生成校验码ECC
- 写校验码到OOB页中
读过程:
- 读出页数据,并计算当前数据的ECC
- 读出存在OOB页里的原始ECC
- 比较两个校验码,相同则读成功,不同则出现了位反转,需重新读取。


确定通信时序:
")
")
")
- 通过图2和图1可以看出:
tCS:等待芯片使能CE的时间, tCS=20nS
tCLS和tALS:等待WE(写信号)结束的时间, tCLS=tALS=15nS
tWP:WE(写信号)维持时间, tWP=15nS
tALH:等待命令写入成功的时间, tALH=5nS
tCLH:等待地址写入成功的时间, tCLH=5nS
- 通过查看2440芯片手册,nandflash时序图,需要设置TACLS,TWRPH0和TWRPH1
TACLS:属于等待WE(写信号)就绪的时间,对比图2得出TACLS= tCLS- tWP=0nS
TWRPH0:属于WE(写信号)的时间, 对比图2得出TWRPH0= tWP=15nS
TWRPH1:属于等待命令写入成功的时间,对比图2得出TWRPH1=tALH=tCLH=5nS
- 在NFCONF寄存器中设置这三个参数
TACLS[13:12] :表示Duration(持续时间)=HCLK*TACLS,由于Duration=0nS,所以TACLS=0
TWRPH0 [10:8] :表示Duration(持续时间)=HCLK*( TWRPH0+1),由于Duration=15nS,HCLK=10nS(100Mhz),所以TWRPH0 =1.
TWRPH1 [6:4] :表示Duration(持续时间)= HCLK*( TWRPH1 +1),由于Duration=5nS,HCLK=10nS(100Mhz),所以TWRPH1 =0
- 代码如下:
/ nand flash 时序 /#define TACLS 0
#define TWRPH0 1
#define TWRPH1 0
/ nand flash 寄存器 /
#define NFCONF ((volatile unsigend long )0X4E000000); //配置寄存器(用来设置时序)
#define NFCONT ((volatile unsigend long )0X4E000000); //控制寄存器(用来使能nandflash控制器以及ECC编码器,还有控制芯片使能CE脚)
#define NFCMMD ((volatile unsigend char )0X4E000000);//发送命令寄存器(命令只有8位)
#define NFADDR ((volatile unsigend char )0X4E000000);//发送地址寄存器(地址只有8位)
#define NFDATA ((volatile unsigend int )0X4E000000);//读/写数据寄存器(数据只有8位)
#define NFSTAT ((volatile unsigend int )0X4E000000);//运行状态寄存器(用于判断RnB脚)
/因为Nand Flash只有8位I/O脚,所以NFCMMD/ NFADDR/ NFDATA三个寄存器值都是unsigend char型 /
void nand_init(void)
{
/ 设置时序 /
NFCONF = (TACLS<<12)|(TWRPH0<<8)|(TWRPH1<<4);
/ bit4=1:初始化ECC, bit1=1:禁止片选 bit0=1:启动nandflash控制器/
NFCONT = (1<<4)|(1<<1)|(1<<0);
}
(2)编写nand_read()函数
在实现nand_read()函数前,还需要实现以下几个子函数:nand_select()、nand_deselect()、nand_cmd()、nand_waite_idle()、nand_read_data();
- 1. 片选使能函数(在读写FLASH之前都要选中片选)
void nand_select(void) //使能片选
{
int i;
NFCONT&=~(1<<1); // NFCONT控制器位1置0
for(i=0;i<10;i++); //等待芯片使能成功
}
- 2. 取消片选函数(在退出读写FLASH时要取消片选)
void nand_deselect(void) //取消片选
{
int i;
NFCONT&=~(1<<1); // NFCONT控制器位1置0
for(i=0;i<10;i++); //等待芯片使能成功
}
- 3. nand写命令
void nand_cmd(unsigned char cmd)
{
volatile int i;
NFCMMD = cmd;
for (i = 0; i < 10; i++);
}
- 4. 判断RnB状态函数(在写入所有命令后都要判断RnB脚是否为高电平就绪)
void nand_wait_ready(void)
{
while (!(NFSTAT & 1));
}
- 5. 读数据命令
unsigned char nand_data(void)
{
return NFDATA;
}
- 6. 写地址命令
首先Nand Flash引脚只有8位,然而地址共有2048(块)_64(页)_2KB,为了读出多个地址,如下图,所以需要分5个周期来实现发送地址:

如上图,其中 A10~A0对应页大小(列),由于nandflash每页2048B,所以只用到A10~A0;
A28~A11对应页目录(行),表示共有2048块*64(每块有64页)个目录
例如,4097 地址就是:
A10~A0=4097%2048= 1(A0=1,其余为0)
A28~A11=4097/2048=2(A13=1,其余为0)
void nand_addr(unsigned int addr)
{
unsigned int col = addr % 2048;
unsigned int page = addr / 2048;
volatile int i;
NFADDR = col & 0xff; / A7~A0,第1周期 /
for (i = 0; i < 10; i++);
NFADDR = (col >> 8) & 0xff; / A10~A8,第2周期 /
for (i = 0; i < 10; i++);
NFADDR = page & 0xff; / A18~A11,第3周期 /
for (i = 0; i < 10; i++);
NFADDR = (page >> 8) & 0xff; / A26~A19,第4周期 /
for (i = 0; i < 10; i++);
NFADDR = (page >> 16) & 0xff; / A27~A28,第5周期 /
for (i = 0; i < 10; i++);
}
- 7. nand 读数据命令

如上图,例如:当要reset复位nand flash时:
1) 使能片选nand_select();2) 发送0XFF复位命令nand_cmd(0xFF);
3) 等待RnB状态是否就绪 nand_wait_idle();
4) 取消片选 nand_deselect();

nand flash 读数据分为了以下几个步骤:
(1) 使能片选CE,将CLE置1,等待发送命令(2) 将WE置低,将IO置为0X00,然后拉高WE,触发一次上升沿,则将把0x00写入flash中
(3) 将CLE置0,表示发送地址(分为5个周期)
(4) 发送读命令0X30
(5) 等待RnB信号为高电平
(6) 读数据(在同一页里,数据可以连续读,读下一页时,需要重新发送新的地址才行例如:读1000地址到2050地址时,
1.发出1000地址,到达页0的1000地址上,然后再连续读(2048-1000)次,直到读到页0的2047处.
2.再发出2048地址,到达页1的0地址上,然后连续读(2051-2048)次,直到读到2050为止)
(7) 取消片选nCE
/*
* src:源地址,为32位地址,所以用unsigend int表示
dest:目的地址内容,由于这里是将数据读出到目的地址内容中,所以需要用到指针,
* 因为每个地址里存的是一个字节,所以用unsigend char型
*/
void nand_read(unsigned int src,unsigned char *dest,unsigned int len)
{
int col = src % 2048; //第一次读,可能不是读的页首地址,所以需要记录当前页的位置
int i=0; //当前读了0次
nand_select(); //1使能片选nCE
while(i<len)
{
nand_cmd(0X00); //2发送读命令0X00
nand_addr(src); // 3发送yuan地址(分为5个周期)
nand_cmd(0X30); //4发送读命令0X30
nand_wait_idle(); //5等待RnB信号为高电平
for(;(col<2048)&&(i<len);col++) //连续读页内数据
{
dest[i]=nand_read_data(); //6.读数据
i++;
src++;
}
col=0;
}
nand_deselect(); // 取消片选nCE
}
(3)编写重定位函数:copy_code_tosdram()
//
/ 重定位函数 /
//
/ 复制代码段(长度为len = __bss_start- _start)到SDRAM链接地址dest(0x30000000)处/
void copy_code_to_sdram(unsigned char src, unsigned char dest, unsigned int len)
{
unsigned int i = 0;
/ 判断nor启动还是nand启动 /
if (isBootFromNorFlash())
{
while (i < len) /Nor启动,则直接复制/
{
dest[i] = src[i];
i++;
}
}
else
{
nand_read((unsigned int)src, dest, len);
}
}
(4)编写isBootFramNorFlash()函数,来判断nand启动还是nor启动
/*/
/ 判断是NOR启动还是NAND启动 /
/*/
int isBootFromNorFlash(void)
{
volatile int p = (volatile int )0;
unsigned int tmp = *p;
p = 0x12345678; /向flash写*/
if (*p == 0x12345678)
{
p = tmp; / 若能成功写入,就是nand flash */
return 0;
}
else
{
return 1; / 写不成功,就是NOR flash/
}
}
(5)编写clear_bss()函数
//
/ bss段清除函数 /
//
void clear_bss(void)
{
extern int __bss_start, __bss_end;
int *p = &__bss_start;
for (; p < &__bss_end; p++)
*p = 0;
}
3、添加头文件: setup.h和serial.h
(1)添加串口支持文件
- 将串口uart0初始化文件serial.c添加到当前工程目录中,并加以修改。
/*/
/ 初始化串口,实现终端显示 /
/*/
/ 串口引脚的GPIO设置寄存器 /
#define GPHCON ((volatile unsigned long )0x56000070)
#define GPHUP ((volatile unsigned long )0x56000078)
/ UART registers/
#define ULCON0 ((volatile unsigned long )0x50000000)
#define UCON0 ((volatile unsigned long )0x50000004)
#define UFCON0 ((volatile unsigned long )0x50000008)
#define UMCON0 ((volatile unsigned long )0x5000000c)
#define UTRSTAT0 ((volatile unsigned long )0x50000010)
#define UTXH0 ((volatile unsigned char )0x50000020)
#define URXH0 ((volatile unsigned char )0x50000024)
#define UBRDIV0 ((volatile unsigned long )0x50000028)
/ 串口发送状态标志/
#define TXD0READY (1<<2)
#define PCLK 50000000 // PCLK = 50MHz
#define UART_CLK PCLK // UART0的时钟=PCLK
#define UART_BAUD_RATE 115200 // 波特率115200
#define UART_BRD ((UART_CLK / (UART_BAUD_RATE * 16)) - 1)
/*
* 初始化UART0
* 115200,8N1,无校验
*/
void uart0_init(void)
{
GPHCON |= 0xa0; // GPH2,GPH3����TXD0,RXD0
GPHUP = 0x0c; // GPH2,GPH3�ڲ�����
ULCON0 = 0x03; // 8N1(8������λ�����飬1��ֹͣλ)
UCON0 = 0x05; // ��ѯ��ʽ��UARTʱ��ԴΪPCLK
UFCON0 = 0x00; // ��ʹ��FIFO
UMCON0 = 0x00; // ��ʹ������
UBRDIV0 = UART_BRD; // ������Ϊ115200
}
/*
* 输出单个字符
*/
void putc(unsigned char c)
{
/ 等待串口准备好 /
while (!(UTRSTAT0 & TXD0READY));
/向串口输入字符 /
UTXH0 = c;
}
/*
* 输出字符串
*/
void puts(char *str)
{
int i = 0;
while (str[i])
{
putc(str[i]);
i++;
}
}
/*
* 输出val的16进制数表示,主要用于调试检查某内存地址的值是否正确
*/
void puthex(unsigned int val)
{
/ 0x1234abcd /
int i;
int j;
puts("0x");
for (i = 0; i < 8; i++)
{
j = (val >> ((7-i)*4)) & 0xf;
if ((j >= 0) && (j <= 9))
putc('0' + j);
else
putc('A' + j - 0xa);
}
}
(2)添加setup.h头文件
- 因为TAG结构体定义是存在u-boot-1.1.6/include/asm-arm/setup.h中,所以设置TAG参数需要用到这个文件,将setup.h复制到当前工程目录下。
- 修改setup.h文件,删除以下不需要的代码:
- #define __tag __attribute__((unused, __section__(".taglist")))
#define __tagtable(tag, fn)
static struct tagtable __tagtable_##fn __tag = { tag, fn }
#define tag_member_present(tag,member)
((unsigned long)(&((struct tag *)0L)->member + 1)
<= (tag)->hdr.size * 4)得到以下setup.h文件:
#ifndef __ASMARM_SETUP_H
#define __ASMARM_SETUP_H
#define u8 unsigned char
#define u16 unsigned short
#define u32 unsigned long
/*
* Usage:
* - do not go blindly adding fields, add them at the end
* - when adding fields, don't rely on the address until
* a patch from me has been released
* - unused fields should be zero (for future expansion)
* - this structure is relatively short-lived - only
* guaranteed to contain useful data in setup_arch()
*/
#define COMMAND_LINE_SIZE 1024
/ This is the old deprecated way to pass parameters to the kernel /
struct param_struct {
union {
struct {
unsigned long page_size; / 0 /
unsigned long nr_pages; / 4 /
unsigned long ramdisk_size; / 8 /
unsigned long flags; / 12 /
#define FLAG_READONLY 1
#define FLAG_RDLOAD 4
#define FLAG_RDPROMPT 8
unsigned long rootdev; / 16 /
unsigned long video_num_cols; / 20 /
unsigned long video_num_rows; / 24 /
unsigned long video_x; / 28 /
unsigned long video_y; / 32 /
unsigned long memc_control_reg; / 36 /
unsigned char sounddefault; / 40 /
unsigned char adfsdrives; / 41 /
unsigned char bytes_per_char_h; / 42 /
unsigned char bytes_per_char_v; / 43 /
unsigned long pages_in_bank[4]; / 44 /
unsigned long pages_in_vram; / 60 /
unsigned long initrd_start; / 64 /
unsigned long initrd_size; / 68 /
unsigned long rd_start; / 72 /
unsigned long system_rev; / 76 /
unsigned long system_serial_low; / 80 /
unsigned long system_serial_high; / 84 /
unsigned long mem_fclk_21285; / 88 /
} s;
char unused[256];
} u1;
union {
char paths8;
struct {
unsigned long magic;
char n[1024 - sizeof(unsigned long)];
} s;
} u2;
char commandline[COMMAND_LINE_SIZE];
};
/*
* The new way of passing information: a list of tagged entries
*/
/ The list ends with an ATAG_NONE node. /
#define ATAG_NONE 0x00000000
struct tag_header {
u32 size;
u32 tag;
};
/ The list must start with an ATAG_CORE node /
#define ATAG_CORE 0x54410001
struct tag_core {
u32 flags; / bit 0 = read-only /
u32 pagesize;
u32 rootdev;
};
/ it is allowed to have multiple ATAG_MEM nodes /
#define ATAG_MEM 0x54410002
struct tag_mem32 {
u32 size;
u32 start; / physical start address /
};
/ VGA text type displays /
#define ATAG_VIDEOTEXT 0x54410003
struct tag_videotext {
u8 x;
u8 y;
u16 video_page;
u8 video_mode;
u8 video_cols;
u16 video_ega_bx;
u8 video_lines;
u8 video_isvga;
u16 video_points;
};
/ describes how the ramdisk will be used in kernel /
#define ATAG_RAMDISK 0x54410004
struct tag_ramdisk {
u32 flags; / bit 0 = load, bit 1 = prompt /
u32 size; / decompressed ramdisk size in kilo bytes /
u32 start; / starting block of floppy-based RAM disk image /
};
/ describes where the compressed ramdisk image lives (virtual address) /
/*
* this one accidentally used virtual addresses - as such,
* its depreciated.
*/
#define ATAG_INITRD 0x54410005
/ describes where the compressed ramdisk image lives (physical address) /
#define ATAG_INITRD2 0x54420005
struct tag_initrd {
u32 start; / physical start address /
u32 size; / size of compressed ramdisk image in bytes /
};
/ board serial number. "64 bits should be enough for everybody" /
#define ATAG_SERIAL 0x54410006
struct tag_serialnr {
u32 low;
u32 high;
};
/ board revision /
#define ATAG_REVISION 0x54410007
struct tag_revision {
u32 rev;
};
/* initial values for vesafb-type framebuffers. see struct screen_info
* in include/linux/tty.h
*/
#define ATAG_VIDEOLFB 0x54410008
struct tag_videolfb {
u16 lfb_width;
u16 lfb_height;
u16 lfb_depth;
u16 lfb_linelength;
u32 lfb_base;
u32 lfb_size;
u8 red_size;
u8 red_pos;
u8 green_size;
u8 green_pos;
u8 blue_size;
u8 blue_pos;
u8 rsvd_size;
u8 rsvd_pos;
};
/ command line: 0 terminated string /
#define ATAG_CMDLINE 0x54410009
struct tag_cmdline {
char cmdline[1]; / this is the minimum size /
};
/ acorn RiscPC specific information /
#define ATAG_ACORN 0x41000101
struct tag_acorn {
u32 memc_control_reg;
u32 vram_pages;
u8 sounddefault;
u8 adfsdrives;
};
/ footbridge memory clock, see arch/arm/mach-footbridge/arch.c /
#define ATAG_MEMCLK 0x41000402
struct tag_memclk {
u32 fmemclk;
};
struct tag {
struct tag_header hdr;
union {
struct tag_core core;
struct tag_mem32 mem;
struct tag_videotext videotext;
struct tag_ramdisk ramdisk;
struct tag_initrd initrd;
struct tag_serialnr serialnr;
struct tag_revision revision;
struct tag_videolfb videolfb;
struct tag_cmdline cmdline;
/*
* Acorn specific
*/
struct tag_acorn acorn;
/*
* DC21285 specific
*/
struct tag_memclk memclk;
} u;
};
struct tagtable {
u32 tag;
int (parse)(const struct tag );
};
#define tag_next(t) ((struct tag )((u32 )(t) + (t)->hdr.size))
#define tag_size(type) ((sizeof(struct tag_header) + sizeof(struct type)) >> 2)
#define for_each_tag(t,base)
for (t = base; t->hdr.size; t = tag_next(t))
/*
* Memory map description
*/
#define NR_BANKS 8
struct meminfo {
int nr_banks;
unsigned long end;
struct {
unsigned long start;
unsigned long size;
int node;
} bank[NR_BANKS];
};
extern struct meminfo meminfo;
#endif
4、编写boot.c文件,用于存放main函数
(1)编写main函数代码:
void main(void)
{
void (*theKernel)(int zero, int arch, unsigned int params);
/定义一个函数指针theKernel,其中第一个参数zero:0 /
/ arch:机器ID ,由于芯片类型很多,内核为了辨别芯片而定义的机器ID,其中2440芯片的ID号是362,/
/ params :tag参数位置,这里我们的tag起始地址=0x30000100/
/1 初 始 化 串 口 0 , 使 内 核 能 打 印 信 息 /
uart0_init(); //调用serial.h头文件里的uart0_init()
puts(“uart0 init OKrn”); //打印uart0初始化
/2从 nand flash 里 把 内 核 复 制 到 SDRAM 中 /
puts(“copy kernel from nandrn”); //打印内核复制
nand_read((0x60000+64),0X30008000,0X200000); //烧写2MB,多烧写点避免出错
/*
0x60000+64:表示内核在nand(存储)地址上位置,
0X30008000:内核在sdram(运行)地址上位置
0X200000:内核长度2MB
因为Flash上存的内核格式是:uImage(64B头部(header) + 真正的内核 )
在uboot界面中输入mtd命令可以看到:
kernel分区位于 nand的0X00060000~0x00260000
所以在nand中真正的内核地址=0x60000+64,
在uboot界面中输入boot命令可以看到:
Data Size: 1848656 Bytes =1.8 MB
Load Address: 30008000
所以内核目的地址=0X30008000
长度=1.8MB
*/
/3 设 置 T A G 参 数 /
puts(“set boot paramsrn”); //打印设置参数信息
setup_start_tag (void); //在0X30000100地址保存start_tag数据,
setup_memory_tags (void); //保存memory_tag数据,让内核知道内存多大
setup_commandline_tag (“boottargs=noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0”);
/保存命令行bootargs参数,让内核知道根文件系统位置在/dev/mtdblock3,指定开机运行第一个脚本/linuxrc,指定打印串口0/
setup_end_tag (void); //初始化tag结构体结束
/ 4 跳 转 执 行 /
puts(“boot kernelrn”); //打印启动内核
theKernel = (void (*)(int, int, unsigend int))0x30008000;
// 设置theKernel地址=0x30008000,用于后面启动内核
theKernel(0,362,0x300000100); //362:机器ID, 0x300000100: params(tag)地址
/传递参数跳转执行到0x30008000启动内核, /
/相当于: mov r0,#0 /
/ldr r1,=362 /
/ldr r2,= 0x300000100 /
/mov pc,#0x30008000 /
puts(“kernel ERRORrn”); //打印内核启动出错
}
(2) 创建TAG参数 函数
创建tag参数函数代码如下:
#include “setup.h”
static struct tag *params; //定义个tag结构体变量params指针
void setup_start_tag (void) //开始tag
{
params = (struct tag *) 0x30000100; //tag起始地址等于0X30000100
params->hdr.tag = ATAG_CORE; //头部常量tag=0x54410001
params->hdr.size = tag_size (tag_core); //size=5,
params->u.core.flags = 0;
params->u.core.pagesize = 0;
params->u.core.rootdev = 0;
params = tag_next (params); //parmas=( struct tag )((u32 )parmas+ params->hdr.size)
}
// setup_start_tag (bd)保存tag参数如下:
setup_memory_tags (void) //内存tag
{
int i;
params->hdr.tag = ATAG_MEM; //头部常量tag=0x54410002
params->hdr.size = tag_size (tag_mem32); //size=4
params->u.mem.start = 0x30000000; //SDRAM起始地址
params->u.mem.size = 0x4000000; //SDRAM内存大小64M
params = tag_next (params); //指向下个tag
}
// setup_memory_tag s(bd)保存tag参数如下:
int strlen(char *str) //uboot不依赖任何库,所以需要自己写strlen函数
{
int i=0;
while(str[i])
{
i++;
}
return i;
}
void strcpy(char dest, char src)
{
while((dest++=src++)!=’0’&&*dest!=’0’);
}
setup_commandline_tag (char *cmdline) //命令行tag
/*cmdline :指向命令行参数 /
/一般为:“boottargs=noinitrd root=/dev/mtdblock3 init=/linuxrc console=ttySAC0” /
{
int len=strlen(cmdline)+1; //计算cmdline长度,并加上结束符
params->hdr.tag = ATAG_CMDLINE; //头部常量tag=0x54410009
params->hdr.size =(sizeof (struct tag_header) +len+3) >> 2; /size=(字符串长度+头部长度) >>2 /
/“+3”表示:按4字节对齐,比如当总长度=(1,2,3,4)时,size=(总长度+3)>>2=1,实现4字节对齐 /
strcpy (params->u.cmdline.cmdline, cmdline); //复制形参字符串到params->u.cmdline.cmdline
params = tag_next (params); //执行下个tag
}
setup_end_tag (void) //结束tag
{
params->hdr.tag = 0;
params->hdr.size = 0;
}
5、编写链接脚本:boot.lds
(1)链接脚本语法提示:
1、1.lds链接脚本中每个符号(:或者=)左右都要加上空格或TAB按键 ;. = ALIGN(4);
.rodata:{(.rodata)} //这里:左右没有空格,将出错,改为 .rodata : {(.rodata*)}2、lds链接脚本中{}和()后都不能加";"分号。
.rodata : {*(.rodata*)}; //这里"}"后面加了";"逗号,将出错3、lds脚本sections中若是以当前地址.等于xxx时,.后面都要加空格;
.= 0x33f80000; //这里.后面没有加空格,出错
. = 0x33f80000;
. = ALIGN(4);4、lds脚本中定义符号时,都要使符号在前。
__bss_start = .;
.bss : { (.bss) (COMMON) }
. = __bss_end; //这里定义"__bss_end"符号出错,应该改为 __bss_end = .;
(2)链接脚本说明
- 链接脚本中的0x33f80000就是链接地址(即程序运行时,该代码段将被链接到内存的此地址处),共512K空间存放bootloader;
- 定义__bss_start和__bss_end符号,是用来在程序开始之前,将这些未定义的变量清0,节省内存且_bss_start-0x33f80000就等于代码的大小(即copy_code_tosdram函数中len值)。
- SECTIONS {
. = 0x33f80000;
. = ALIGN(4);
.text : { *(.text) }
. = ALIGN(4);
.rodata : {(.rodata)}
. = ALIGN(4);
.data : { *(.data) }
. = ALIGN(4);
__bss_start = .;
.bss : { (.bss) (COMMON) }
__bss_end = .;
}
(3)NAND FLASH分区说明
一般在头文件中会通过MTDPARTS_DEFAULT宏定义,明确flash的分区设置,一般来说会分为4个区,依次存放bootloader、启动参数、内核映像、根文件系统。
bootloader
一开机直接运行u-boot
boot parameters
存放一些可以设置的参数,供u-boot使用
kernel
存放内核区
root filesystem
根文件系统,挂载(mount)后才能使用文件系统中的应用程序
(4)NAND Flash启动的架构和流程
启动流程为:
- 上电后,CPU内置程序会从NAND Flash的特定地址(一般是第一个block块地址)读出Boot-Loader程序到CPU的内部内存中。
- CPU将控制权交给内部存储器中的Boot-Loader;
- Boot-Loader初始化SDRAM,再从NAND Flash中将主程序载入到SDRAM中;
- Boot-Loader将控制权交给主程序。
6、编写makefile文件
备注:在makefile中‘=’与‘:=’的区别:‘=’ 无关位置的等于(比如:”x=a y=$(x) x=b”,那么y的值永远等于最后的值,等于 b ,而不是a)
‘:=’ 有关位置的等于(比如:”x:=a y:=$(x) x:=b”,那么y的值取决于当时位置的值,等于 a ,而不是b)
CC = arm-linux-gcc //定义CC变量=arm-linux-gcc,简化书写,编译命令,(.C,.S)文件生成*.O文件
LD = arm-linux-ld //连接命令,将多个*.O文件生成 boot.elf
AR = arm-linux-ar //库管理命令,这里没有用到
OBJCOPY = arm-linux-objcopy //复制/格式转换命令, boot.elf生成boot.dis
OBJDUMP = arm-linux-objdump //反汇编命令,boot.bin生成boot.dis
//GCC编译参数,-Wall:显示所有错误和警告, -O2:采用2级编译优化
CFLAGS := -Wall -O2
//添加头文件参数,-nostdinc忽略缺省目录, -fno-builtin不连接系统标准启动文件和标准库文件(表示不用自带的strlen()等库函数)
CPPFLAGS := -nostdinc -fno-builtin
//定义objs变量,包含生成boot.bin目标文件需要的依赖文件
objs := start.o init.o boot.o
//执行生成目标文件,首先是先满足objs所有依赖文件都拥有,才执行
boot.bin: $(objs)
${LD} -Tuboot.lds -o boot_elf $^
${OBJCOPY} -O binary -S boot_elf $@
${OBJDUMP} -D -m arm boot_elf > boot.dis
//-c编译不连接。$@表示目标文件 $<表示第一个依赖文件
%.o:%.c
${CC} $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
%.o:%.S
${CC} $(CPPFLAGS) $(CFLAGS) -c -o $@ $<
clean:
rm -f .bin .elf .dis .o
7、下载编译
(1)新建一个文件夹,并命名为bootloader,将以上编写好的:boot.c、init.c、start.S、setup.h、boot.lds和Makefile文件复制进去。然后将该bootloader文件夹通过共享文件夹或FileZilla软件拷贝进虚拟机linux环境下。
(2)在Linux环境下通过终端命令行进入到该bootloader文件夹中,执行make命令,进行编译、链接:

(3)将得到的二进制文件boot.bin拷贝到Windows环境下的D盘根目录下。
(4)键盘“Win + R”组合键,输入cmd回车,打开WIndows下的命令行终端,输入命令d:进入D盘根目录。
(5)打开开发板电源,将JTAG-USB转接工具连接到电脑USB口,在WIndows命令行终端终端输入oflash boot.bin命令,运行FLASH烧录工具,将二进制目标文件烧录进目标板的NAND Flash中:

(6)选择0回车,进入OpenJTAG模式,再依次键入1选择S3C2440目标板、后面都键入0完成烧录。
(7)用串口调试线连接开发板的COM口和电脑的USB口,打开MobaXterm串口连接工具,并连接到开发板。关闭开发板电源后,再重新接通电源,通过MobaXterm软件观察开发板启动情况。
(8)如果程序正确,将会看到开发板顺利启动内核并运行起来了linunx。
获取更多知识,请点击关注: 嵌入式Linux&ARM CSDN博客 简书博客 知乎专栏



**粗体** _斜体_ [链接](http://example.com) `代码` - 列表 > 引用。你还可以使用@来通知其他用户。