

ARHUD (Augmented Reality Head Up Display),即增强现实与抬头显示的结合,是一种将渲染元素投影在真实世界的技术,也是目前用户理解成本最低的展示方式。
HUD功能第一次应用是在二战中,被应用在枪械和战斗机上,80年代初期开始转向民用,90年代初期技术概念被正式提出,并被演变成为汽车上的功能。其实,汽车上还有很多军用转民用的配置,例如惯导装置。
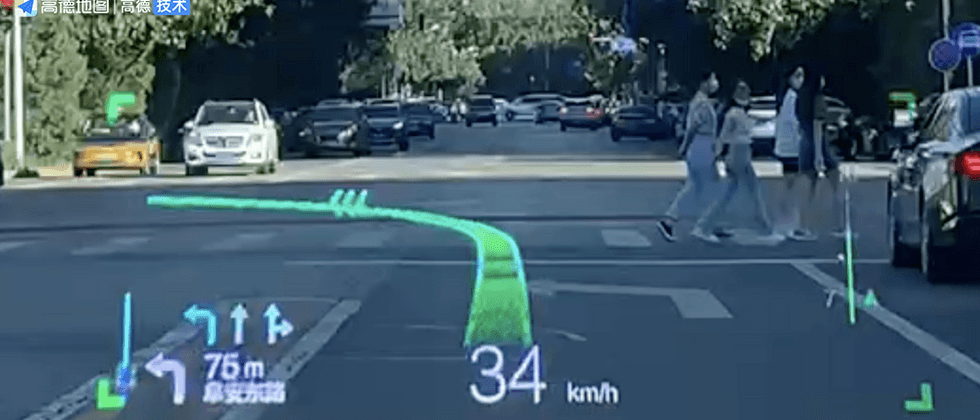
ARHUD驾车导航,就是把车速限速、转向动作、引导线等重要的导航信息,投影到驾驶员视野正前方 ,让驾驶员尽量做到不低头、不转头就能看驾驶引导信息。
高德在ARHUD驾车导航方面做了大量研发工作并拥有业界领先的技术储备和实践经验,在2022年8月,高德地图与北汽、华为合作,推出北汽魔方ARHUD导航。
1.虚像距离(Virtual Image Distance)

虚像距离,Virtual Image Distance,简称VID,简单点说就是虚像到人眼的视觉距离 ,大家都知道人的眼睛也是有焦距的,看远和看近的焦距不同,因此如果VID的距离不够远,在看向较远的地方时ARHUD的显示会由于眼睛焦距的原因而虚化。
传统HUD的VID距离也就是在2.5米左右,而AR HUD的VID距离往往在10米以上,要做到跨车道显示的话,需要投影距离达到20米才行。
传统W-HUD其实可以理解为一个投影仪,将图像反射,投影到了挡风玻璃上(例如手机高德地图的HUD投影功能),实际上相当于把原本显示在仪表盘上的信息,投射到挡风玻璃上。其实这也是HUD设计的初衷——驾驶员不需要低头即可获得车辆行驶的相关信息。
但是W-HUD的图像尺寸有限(通常投影距离3m,显示尺寸15-20寸),能显示的信息较少,且图像不会与道路融合,驾驶员仍然需要将视线从路面上移开,重新对焦才能获得信息,这实际上违背了HUD的设计初衷。
2.视场角(Field Of View)

视场角,Field Of View,简称FOV,视场角包括了以驾驶员眼睛为中心的水平视场角和垂直视场角。 传统HUD的FOV很小,一般只有5度。而AR HUD的水平视场角要在10°以上,理想ONE的ARHUD能够达到20°,问界M5的ARHUD也能够达到13°。
3.人眼位置(Eye Point)
人眼坐标(x, y, z),相对于车体坐标系的位置,以车头中心为坐标原点,单位 米。
人眼坐标会随着驾驶者的高矮、坐姿、头部位置移动而动态调整。


4.虚像旋转角度(三自由度)
4.1. 沿X轴旋转角度(LDA、下视角)

4.2. 沿Y轴旋转角度(横滚角)

4.3. 沿Z轴旋转角度(朝向角)
5.虚像坐标转换(世界坐标转虚像坐标)
首先,看一下在相机投影中,世界坐标 转 像素坐标。

然后,看一下在HUD投影中,世界坐标 转 虚像坐标(单位也是像素)。
在已知 虚像距离、视场角、人眼位置、虚像角度 的前提下,就可以进行 世界坐标 与 虚像坐标 的互相转换。

通过对比相机投影 和 HUD投影 可以发现,相机投影中的焦距 与 HUD投影中的虚像距离 有着紧密联系。
人的眼睛也是有焦距的,看远和看近的焦距不同,因此如果虚像距离不够远,在看向较远的地方时ARHUD的显示会由于眼睛焦距的原因而虚化。
所以,虚像距离 联系着 人眼的焦距。
如果虚像距离过小,驾驶员需要将视线从路面上移开,重新对焦才能看清HUD上的信息,这实际上违背了HUD的设计初衷。
6.坐标转换的应用

6.1. 验证虚像投影是否准确
面临问题 :虚像投影主要目的是将真实世界坐标投影在虚像中,如果无法做到准确对应,会影响ARHUD准确性。
解决方法 :由硬件系统方传入投影参数——虚像距离、视场角、人眼位置、虚像分辨率、虚像角度,计算出投影矩阵,通过该矩阵可进行 虚像坐标 与 车体世界坐标 的转换。
取虚像上几个具有代表性的像素坐标(一般是九个点),转换成车体世界坐标,即可计算出虚像可视范围——最远可见、最近可见、最左可见、最右可见、中心可见。

在计算出的可视范围上放置标识物体(车前方),查看该标识物体在虚像中的位置,是否与九个点重合,如果重合则代表投影准确,如果不重合则投影误差较大,需要通知硬件系统方进行调整。
6.2. 解决变道引导线超出虚像显示区
面临问题 :AR导航中的变道引导线是贴合真实世界指向相邻应行驶车道的,如果虚像可视范围无法覆盖相邻车道,则会导致变道线超出显示区。
解决方法 :根据变道信息(向左变道、向右变道、变到几车道),在虚像上取几个趋势性像素坐标,转换成 车体世界坐标,最终投影出来。因为是在虚像上取的坐标,所以始终不会超出虚像显示区域。

7.ARHUD 硬件技术
7.1. TFT
即TFT-LCD,其原理是LED发出的光透过液晶单元后将屏幕上的信息投射出去。
优点 :该方案是业界最早开发的投影方案,方案成熟,相对成本低。(目前国外供应商能做到2500-3000左右,本土供应商能做到2000左右。随着技术的成熟和相关产业链的发展,成本应该可以进一步做到2000以内)。
缺点 :阳光倒灌问题难以解决。亮度不够,在白天显示效果较差。

7.2. DLP
即Digital Light Processing的缩写,采用TI的DMD芯片,把影像信号经过数字处理再投射出来。
优点 :DMD芯片可确保投影的活动影像色彩艳丽、细腻逼真、自然真实。由于经过数字化处理,可将图像中的缺陷抹去。DMD芯片更小、更易于携带。
缺点 :造价更贵(成本在5000元以上)。
DLP可能出现彩虹效应,影像信号在数字处理过程中颜色混合及转换异常。
DLP显示屏由于需要采用TI的DMD芯片,涉及到技术专利,因此只有奔驰和传祺两家车型在用。

7.3. LCOS
即Liquid Crystal on Silicon的缩写,即液晶附硅,也叫硅基液晶,是一种基于反射模式,尺寸比较小的矩阵液晶显示装置。这种矩阵采用CMOS技术在硅芯片上加工制作而成。目前国内主要是华为跟一数科技采用这种方案。
优点 :在整体反射模式下,光利用效率高,画面更加自然。价格可控,CMOS技术由多家厂商掌握,避免DMD芯片只由德州仪器独家垄断的情况。反光层和硅基板电路之间具有一层金属遮光层,可以有效防止阳光倒灌。
缺点 :目前整体技术还不太成熟,没有大规模量产,有待进一步发展。HUD可视区域较小,投影光机体积相对较大。


8.ARHUD主要技术难点
- 市场角小
目前市面上的ARHUD设备FOV过小,影像只能呈现在驾驶者视线范围中的一小部分。
- 投影亮度
HUD影像的亮度,为了对应不同的外部光线、气候等影响,需要更高的亮度来达到较佳的影像品质与视觉效果。
- 硬件体积
降低HUD的系统整体体积,现有TFT/DLP等模组本身的限制,加上需求较大的FOV,都会让HUD系统的体积越来越大,与车体的空间分配冲突。
- 实景贴合
需要通过各种路网数据、传感器数据、GPS信号等,进行实时矫正。确保AR的图形和真实路况匹配。
- 人眼位置
如何动态监测人眼位置,调整ARHUD投射的画面,使之避免出现画面发虚、错位等问题,比较考验HUD厂商的能力。
结语
ARHUD技术发展至今,已成为驾车导航产业必争之地。可以预期的是,苹果公司的ARHUD在未来也会逐渐向驾车导航靠拢。当然,还有很多技术难点需要攻克,来提升用户体验,真正实现 导航视野内“所见即所得”。值得欣慰的是,在ARHUD技术迅猛发展过程中,见到了很多国内企业努力的身影。希望未来有更多中国技术在ARHUD领域大放异彩!
注:文中部分配图来自网络,如有侵权,请联系我们删除。





**粗体** _斜体_ [链接](http://example.com) `代码` - 列表 > 引用。你还可以使用@来通知其他用户。