
头“秃”来自“the book of shader”
今天我的文章可能会有点抽象。我尽量“有图有真相”,不让大家的大脑内存泄漏!
本文会讲到:
- transform 2D变换背后的数学原理
- 如何直观理解一个矩阵
- 齐次变换是什么?
- 可能会涉及一些:逆矩阵(),正交(),向量的知识,用到的时候假装自己知道就可以了!
- 但基本不会涉及3D,四元数,各类引擎中MVP矩阵变换 。话不多说我们开始吧
scale+skew+rotate我全都要
作为一个传统前端,一个资深csser,一定知道transform属性上,是可以配置rotate用于旋转,scale用于缩放,skew用于斜切。

更进一步,transform还提供matrix,matrix3d这样的操作让我们可以更自由地变换图形:

所以大概能够想到2D的rotate,scale,skew本质其实就是某种特殊的矩阵。
那么接下来就是如何把这三个操作写成矩阵形式。

不过,在此之前我们先想想,矩阵操作的基本单元是什么?
是“点”
点组成了线,线组成了面!

如果你有写过shader,你会知道gl也是操作一堆的点来生成画面的。
所以“女神放大了都是马赛克

当然!不放大也可能有马赛克(误)
既然知道矩阵操作的单元是“点”,那么任意的点p(x,y)经过一个矩阵变化后的结果是什么?
2D:

3D:
上图公式表示矩阵的乘法:


矩阵*矩阵,则可以把右矩阵看成两个点/向量拼接而成的。乘法规则不变
现在让我们来看看scale/skew/rotate所对应的矩阵:

对于最简单的scale矩阵,(x,y)经过缩放矩阵变换我们期望它变成(scaleXx, scaleYy),带入上面的公式1验证:

而对于旋转矩阵,这个 表示逆时针旋转后向量,与原向量之间的夹角。

让我们验证一下,假设对于p0(1,1)那么它经过 =45度旋转后,将变为p1(0,√2):
斜切矩阵也是类似的套路,角度从一个变成了两个。这个后文我们还会提到。读者也可以自行验证下。

目前我们虽然把scale,skew,rotate三种变换写成了矩阵,但他们三者依旧是独立的。人类总是贪婪的,能不能只用一种方式去理解它们?换言之,我们更想要知道,对于任意的变换(这里说任意其实不太严谨,这个我们后面会提到),其对应的矩阵是什么?
那就要用引入一个新的概念:

“基”向量(必须用个紫色)
我们知道矩阵其实是在改变“点”,在空间中我们如何表示一个点?
在2D笛卡尔坐标体系下,两个相互垂直的方向构成x轴和y轴。任意点P则用一对数(a,b)表示。比如(2,3)就表示2D空间中的一个确定的点,这里的2,3的意义又是什么?
这里2的意思就是p在x方向占据2个单位长度,3就表示在y方向占据3个单位长度。这两个单位长度用向量表示为[1,0]^T与[0,1]^T 。
这种观点下,点可以写成:2 [1,0]^T + 3 [0,1]^T :
T就是转置,可以理解把原先横着写的行向量,竖着写成列向量。看!就是下图那种。
推广到任意坐标(a,b):

|1 0||a|
|0 1||b| 而其中[1,0]^T与[0,1]^T 就被称为一组基向量。他们组成的这个矩阵其实有个名字叫做单位矩阵。
单位矩阵在更复杂的交互中其实有很多重要的性质,但是和今天的话题没啥关系,就当听个冷知识吧!
high-level地理解矩阵
我们现在把“基向量”和用“基向量”表示的点都带入线性变换中,看看经过一次变换之后基向量会如何改变 ?

这里我们发现了一个有趣的现象:
原先的基向量x0,y0,经过变换后变为 1, 1(就是上图中红色的部分)。原先的点P0经过变换后变为P1,此时点p1是可以用 1, 1描述。而 1, 1前面的系数还是原来p0(a,b)的系数。(虽然形状发生了变化,但图中红色的虚线网格与基向量的比例不变)
整理成数学语言就是:

举个“栗”子:
对于一个缩放操作,x轴放大1.5倍,y轴放大2倍。
[x] = [1.5,0]^T
[y] = [0,2]^T

那么该变换对应的矩阵就是:
|x y| = |1.5 0 | = |scaleX 0 |
| 0 2 | | 0 scaleY |同理,旋转和斜切变换也可以使用基向量的思路,易得对应矩阵:
这样包括但不限于rotate/scale/skew的矩阵变换,我们都可以从基向量的角度去理解了。

说到这,关于2D矩阵的知识点,大致就结束了!吗?
是不是有哪里怪怪的?

老子动不了了!
对!我们完全没有解释translate。到目前为止我们说的2*2矩阵只能进行如下操作

只能把点[x,y]变换成[ax+cy,bx+dy]^T的形式。
这种变换被叫做线性变换,线性变换有2个比较明显的特点:
- 线性:对于矩阵变换去观察空间中任意的点,它们所受到的影响是一致的。或者不严谨地说,网格不会在变换后变成曲线(如下图)也不会不均匀:局部放大,另一局部缩小。
- 关于原点对称:
图中不论基向量如何变化,原点都没有发生改变。


这个性质其实也很好理解,[0,0]这个点不管用什么矩阵处理后都是[0,0] ,这意味着实际上矩阵变换没有能力进行平移操作。
因为线性变换的代数本质是:

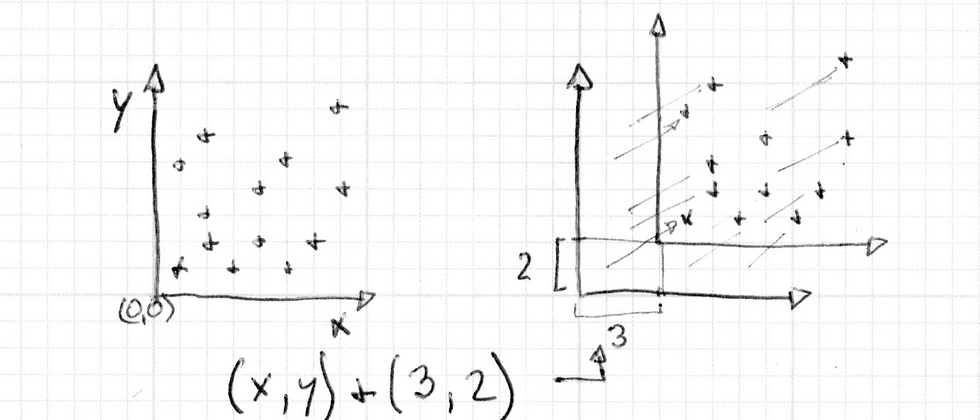
然鹅!平移操作的代数本质是:

这时候仅仅使用一个2D矩阵,想要平移。就真的是“臣妾做不到了”,所以这时我们引入一个新的变换“齐次变换”!

齐次变换
说好是2D怎么又给我整成3D?虽然我们把原来的2维点[x,y]拓展为三维的点[x,y,1]。

但我们不必操心第三个行,我们仅看矩阵的前两行即可:

实际上,它就是css中的matrix(a,b,c,d,tx,tx)。而这个矩阵变换的结果就真的实现了2D线性变换与平移:
至此,2D矩阵的变换的原理部分就基本说完了。下面我们结合下PIXI.js的源代码进行一些简单的源码分析:

秃头环节
PIXI.js采用transform+matrix的组合实现图形操作。
让我们先来看看Matrix.ts.。
export class Matrix
{
// ......
constructor(a = 1, b = 0, c = 0, d = 1, tx = 0, ty = 0)
{
/**
* @member {number}
* @default 1
*/
this.a = a;
/**
* @member {number}
* @default 0
*/
this.b = b;
/**
* @member {number}
* @default 0
*/
this.c = c;
/**
* @member {number}
* @default 1
*/
this.d = d;
/**
* @member {number}
* @default 0
*/
this.tx = tx;
/**
* @member {number}
* @default 0
*/
this.ty = ty;
}
// .....
}可以看到这个构造函数的参数,和我们上文所说的齐次变换矩阵的前两行是一毛一样的,也与css中的matrix参数一致。
但是它的注释还是容易引起一些误会的:
/**
* @param {number} [a=1] - x scale
* @param {number} [b=0] - y skew
* @param {number} [c=0] - x skew
* @param {number} [d=1] - y scale
* @param {number} [tx=0] - x translation
* @param {number} [ty=0] - y translation
*/具体每个参数的用途,大可不必拘泥,我们现在可以从基向量的角度去准确理解了。
matrix的大部分方法都比较容易理解,这里我们挑选几个来说说吧!
rotate(angle: number): this
{
const cos = Math.cos(angle);
const sin = Math.sin(angle);
const a1 = this.a;
const c1 = this.c;
const tx1 = this.tx;
this.a = (a1 * cos) - (this.b * sin);
this.b = (a1 * sin) + (this.b * cos);
this.c = (c1 * cos) - (this.d * sin);
this.d = (c1 * sin) + (this.d * cos);
this.tx = (tx1 * cos) - (this.ty * sin);
this.ty = (tx1 * sin) + (this.ty * cos);
return this;
}rotate的作用就是旋转,matrix本身也记录了一套变换。那么在此基础上,再进行操作就需要使用矩阵的乘法。矩阵的乘法是有顺序的。例如我们需要对点进行如图平移,缩放,平移操作,就必须把矩阵依次序相乘:

而rotate操作是在原有矩阵之后执行的,所以新矩阵就是[Result] = Rotate:

是不是豁然开朗?

是的!除非是一些特殊操作,大部分正常人类是不会愿意面对矩阵计算的,因此PIXI提供了另一个类Transform。把矩阵变换用一些比较容易理解的属性(position,scale,rotate...)代替(CSS重的transform也有类似功效)除外,Transform代码也比较业务,它上面的数据都是ObservablePoint,还实现了父子级的关系。而实际运行时,Transform通过decompose方法实现自身数据与Matrix数据的转换。
decompose(transform: Transform): Transform
{
// sort out rotation / skew..
const a = this.a;
const b = this.b;
const c = this.c;
const d = this.d;
const pivot = transform.pivot;
const skewX = -Math.atan2(-c, d);
const skewY = Math.atan2(b, a);
const delta = Math.abs(skewX + skewY);
if (delta < 0.00001 || Math.abs(PI_2 - delta) < 0.00001)
{
transform.rotation = skewY;
transform.skew.x = transform.skew.y = 0;
}
else
{
transform.rotation = 0;
transform.skew.x = skewX;
transform.skew.y = skewY;
}
// next set scale
transform.scale.x = Math.sqrt((a * a) + (b * b));
transform.scale.y = Math.sqrt((c * c) + (d * d));
// next set position
transform.position.x = this.tx + ((pivot.x * a) + (pivot.y * c));
transform.position.y = this.ty + ((pivot.x * b) + (pivot.y * d));
return transform;
}其中Math.atan2(-c, d)和Math.atan2(b, a)。其实在计算2个基向量变换前后的夹角:

当ø与 相等时,我们就认为这是一个旋转操作。但是由于数值精度的问题,浮点数很难会相等,所以 PIXI采用差值法判断,即
var delta = Math.abs(ø - );
if(delta < Number.EPSILON){
...
}else{
....
}这里需要注意x基向量确定的是Y方向的斜切值,而y基向量确定的是X方向的斜切值:

此处出现了我觉得是这段代码中最神来之笔的地方。

由于我们算出来的skewX其实是负方向的。而delta = Math.abs(ø - )又需要取两值之差。PIXI就直接在Math.atan2(-c, d)加上了符号。后续判断直接使用delta = Math.abs(skewX + skewY);而skewX方向也被校正了。这种代码上的整合和巧思其实遍布PIXI.js的每个角落,实在佩服作者的逻辑能力。

最后说说scale和position
position就是正常的齐次变换。
而对于scale,我们判断是否有缩放的标准就是基向量是否缩放,所以scale.x就是旋转后x基向量的模长(aa+bb)^0.5
scale.y同理。
以上就是个人总结的一些关于2D矩阵的知识点,希望各位大佬不吝赐教。
突然发现我们好久没聊shader了,下期我们就来聊聊水雾和毛玻璃的shader要如何实现吧。
参考资料:
Fundamentals of Computer Graphics, Fourth Edition
《3blue1Brown线性代数本质》





**粗体** _斜体_ [链接](http://example.com) `代码` - 列表 > 引用。你还可以使用@来通知其他用户。